You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
12 KiB
12 KiB
| title | subtitle | author | date |
|---|---|---|---|
| Using Python for Verification of Digital Systems | QZ 2021 | [Torsten Meißner torsten.meissner@secunet.com] | February 2022 |
Overview
-
Introduction
-
Functional Verification
-
Co-Simulation
-
Cocotb
-
Python Packages
-
Live Demo
-
Summary
Introduction
FPGA-Workflow
- Specification
- Design entry
- Verification
- Synthesis
- Device Mapping
- Place & Route
- Static Timing Analysis
- Programming file generation
Introduction
Design Entry
- Schematic Entry
- Hardware Description Languages (RTL)
- (System)Verilog
- VHDL
- High level languages
- System C
- Bluespec
- Chisel
- nmigen
Functional Verification
- Functional Verification
- Simulation
- Emulation
- Formal Verification
- Property checking
- Equivalence checking
- Lab Tests
- Target platform
- Logic Analyzer
- Oscilloscope
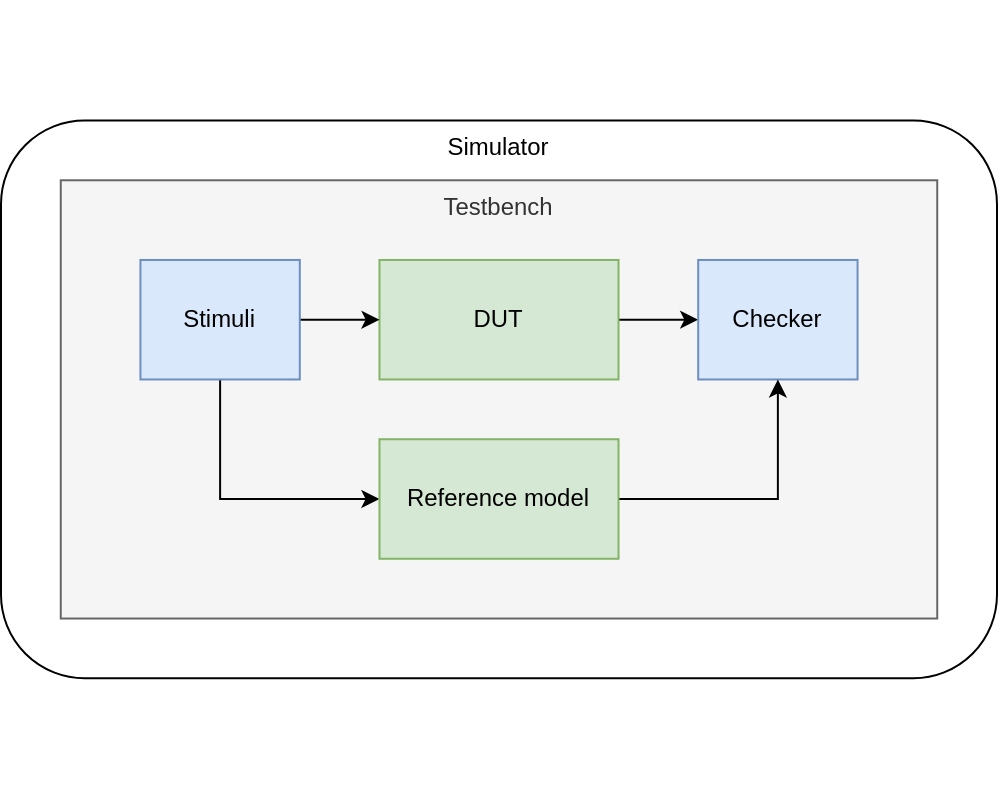
Functional Verification
Simulation
- Executing of design description in a simulator
- Test benches as infrastructure (HDL, C, etc.)
- Reference models (HDL, C, etc.)
- Directed & Random tests
- Code & functional Coverage
- Assertion Based Verification (PSL, SVA)
- Verification Frameworks (UVM, OSVVM, vUnit, etc.)
- Co-Simulation
HDL Simulation
Co-Simulation
- Simulation with access to/from external program code
- Linked per shared library
HDL Programming Interfaces
- VHDL Procedural Interface (VHPI)
- Verilog Procedural Interface (VPI)
- Proprietary interfaces (FLI)
- Access data in VHDL models in the simulator
Features
- Static VHDL Design Data (Traverse hierarchy etc.)
- Dynamic VHDL Objects (R/W values of VHDL objects)
- Interaction and control (Callbacks as comm. mechanism between simulator user code)
- Foreign model instantiation and intercommunication
Co-Simulation with SW reference Model
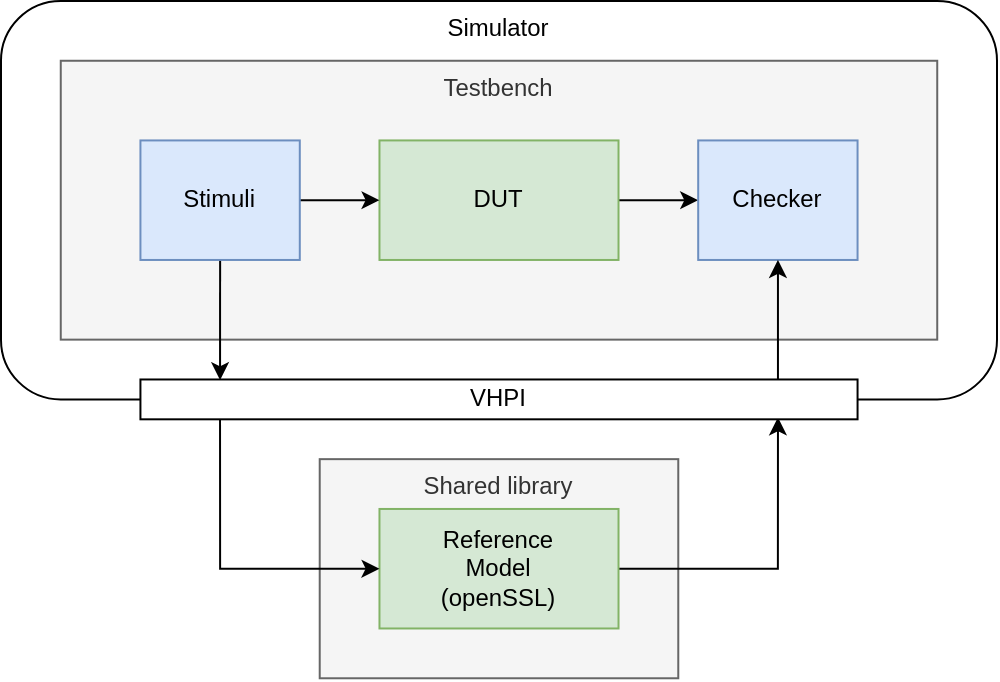
HDL testbench controls program flow
Cocotb
- COroutine based COsimulation TestBench environment
- Verifying HDL designs with Python
- HDL normally only used for design, not the testbench
- Simulator only used to execute DUT RTL description
- Supports many simulators (Free & proprietary)
- Free & open-source, active community
- High-level, multi-paradigm language
- Writing Python is fast - very productive language.
- Easy interfacing to other languages from Python
- Huge library of existing code to re-use
- Interpreted - tests can be edited and re-run w/o recompiling the design
- Popular - far more engineers know Python than Verilog / VHDL
- Working and reliable packet manager (PyPI)
Cocotb Co-Simulation
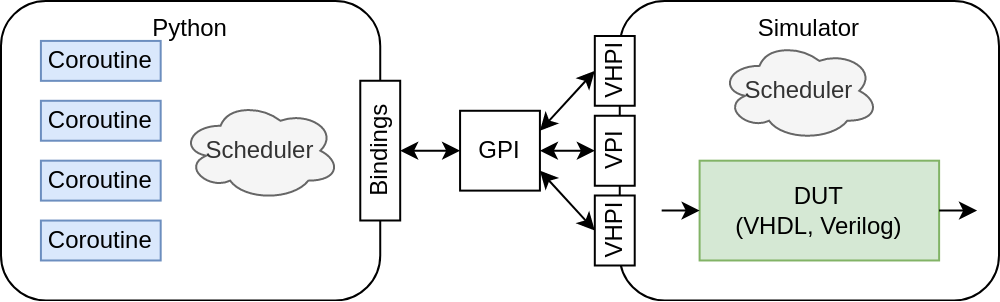
Python testbench controls program flow
Cocotb Design Interaction
Accessing Design
- dut as handle to toplevel instantiation
- Access to toplevel and other signals with dot-notation
# Reference to toplevel clock input
clk = dut.clk_i
# Reference to signal in sub-unit
cpu_pc = dut.cpu.regfile.pc
Read / Write Values from Signals
- Via handle's value property
- Direct R/W access through the hierarchy
# Via value property
valid = dut.valid_i.value
if valid.value == 0:
valid.value = 1
# Direct access through hierarchy
if dut.reset_i.value == 1:
dut.cpu.regfile.pc.value = 0
Cocotb concurrent & sequential execution
async: Mark Functions & Methods as Coroutines
async def reset(signal, time,):
signal.value = 0
# Block execution, wait for simulator time advances by 100 ns
await Timer(time, units='ns') # cocotb built-in class
signal.value = 1
await: Wait for other Coroutines or Simulator
- Block on another coroutines execution
- Pass control of execution back to simulator, allowing simulation time to advance
print("Hold reset")
await reset(dut.reset_i)
print("Released reset")
Cocotb concurrent execution
start()
- Schedules the new coroutine to be executed concurrently
- Yields control to allow the new task (& any other pending tasks) to run
- Resumes the calling task
await cocotb.start(reset(dut.reset_i, 100)
await Timer(90, units='ns')
print(f"Reset is still active: {dut.reset_i.value}")
await Timer(15, units='ns')
print(f"Reset has gone inactive: {dut.reset_i.value}")
start_soon():
- Schedules the new coroutine for future execution, after the calling task yields control
clock = Clock(dut.clk_i, 10, units="ns") # Create a clock, cocotb built-in class
cocotb.start_soon(clock.start()) # Start the clock concurrently
Cocotb test functions
@cocotb.test() Decorator
- Mark a callable which returns a coroutine as a test
- Provides a test timeout
- Allows to mark tests as skipped or expecting errors or failures
- Tests are evaluated in the order of their definition in a test module
@cocotb.test()
async def test_aes_init(dut):
""" Test AES initialization """
...
@cocotb.test()
async def test_aes_enc(dut):
""" Test AES encryption """
...
# This test is skipped from execution
@cocotb.test(skip=True)
async def test_aes_enc(dut):
""" Test AES encryption """
Cocotb Triggers
- Indicate when cocotb scheduler should resume coroutine execution
- Triggers should be awaited by coroutines
- Cause execution of the current coroutine to pause
- Execution of paused coroutine will resumes when trigger fires
- Triggers for simulator events, task synchronization etc.
# Wait for 100 ns
await Timer(100, units='ns')
# Wait for rising clock edge
await RisingEdge(dut.clk_i)
# Wait for 10 clock cycles
await ClockCycles(dut.clk_i, 10)
# Fires when first trigger in fires & returns its result
t1 = Timer(10, units='ns')
t2 = Timer(15, units='ns')
t_ret = await First(t1, t2) # returns after 10 ns simulation time
Cocotb Example: Verifying a UART transmitter
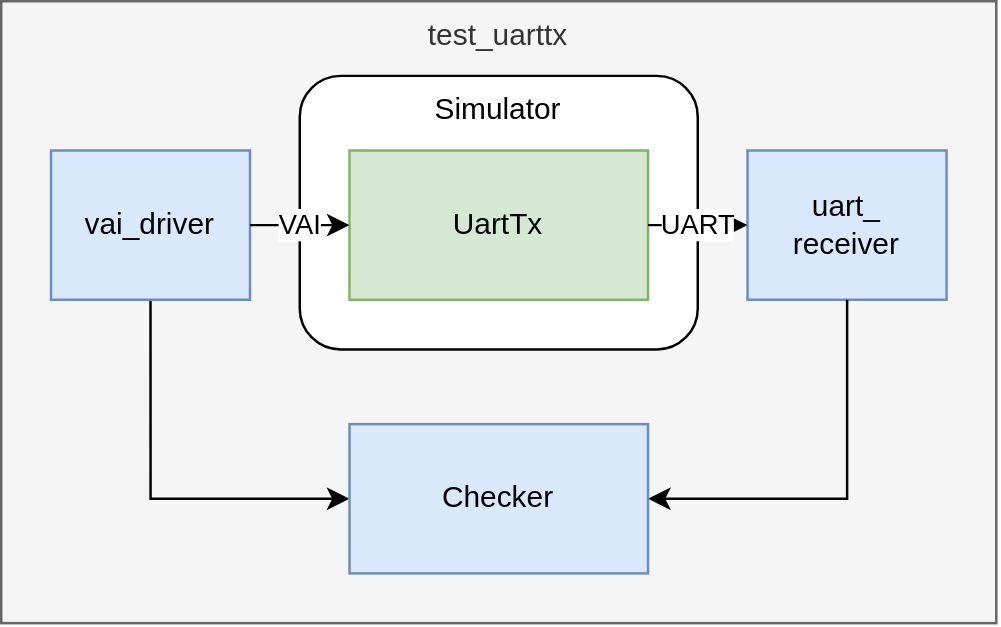
Cocotb Example: Verifying a UART transmitter
Cocotb Example: Verifying a UART transmitter
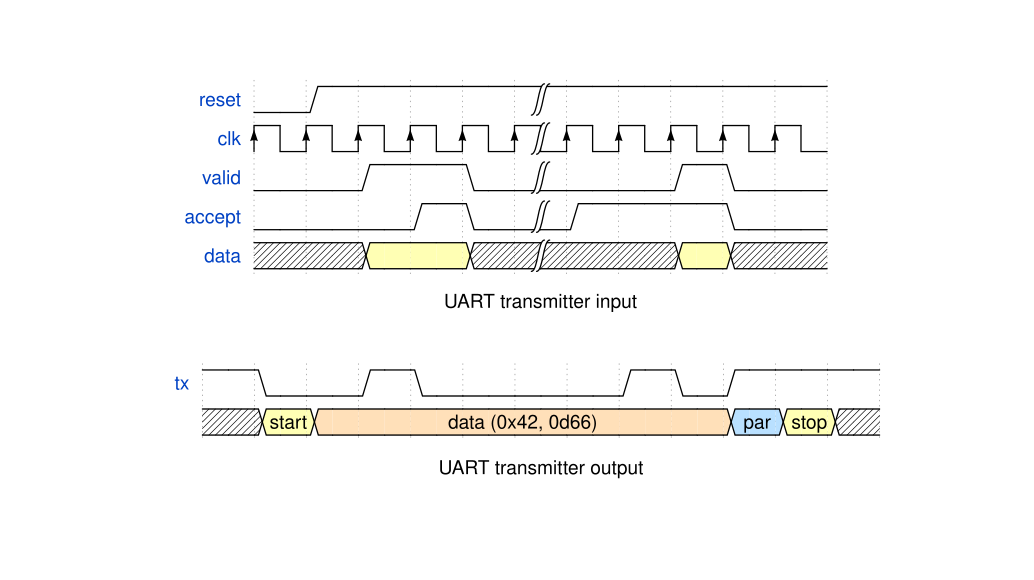
Valid-Accept Driver Model
async def send(self, data, sync=True):
if sync:
await self._clkedge
self._valid.value = 1
if isinstance(self._data, list):
for i in range(len(self._data)):
self._data[i].value = data[i]
else:
self._data.value = data
while True:
await ReadOnly()
if self._accept.value:
break
await self._clkedge
await self._clkedge
self._valid.value = 0
Cocotb Example: Verifying a UART transmitter
UART Receiver Model
async def receive(self):
# Wait for frame start
await FallingEdge(self._txrx)
# Consume start bit
await self._get_start_bit()
# Receive data bits
self._rec = 0
for x in range(self._bits):
await self._wait_cycle()
await ReadOnly()
self._rec |= bool(self._txrx.value.integer) << x
if self._par:
# Consume parity bit
await self._get_parity_bit()
# Consume stop bit
await self._get_stop_bit()
return self._rec
Cocotb Example: Verifying a UART transmitter
Test function
@cocotb.test()
async def test_uarttx(dut):
# Instantiate VAI driver & UART receiver
vai_driver = VaiDriver(dut.clk_i, dut.data_i, dut.valid_i, dut.accept_o)
uart_receiver = UartReceiver(dut.tx_o, dut.clk_i, 10, 8, True);
# Drive input defaults (setimmediatevalue to avoid x asserts)
dut.data_i.setimmediatevalue(0)
dut.valid_i.setimmediatevalue(0)
cocotb.start_soon(Clock(dut.clk_i, 10, units="ns").start()) # Start the clock
await reset(dut.reset_n_i, 100) # Block until reset() has completed
# Test 10 UART transmissions
for i in range(256):
await RisingEdge(dut.clk_i)
await vai_driver.send(i)
rec = await uart_receiver.receive();
assert rec == i, "UART sent data was incorrect on the {}th cycle".format(i)
Cocotb Example: Verifying a UART transmitter
loading VPI module '/usr/local/lib/python3.9/dist-packages/cocotb/libs/libcocotbvpi_ghdl.so'
-.--ns INFO cocotb.gpi ../gpi/GpiCommon.cpp:99 in gpi_print_registered_impl VPI registered
VPI module loaded!
0.00ns INFO Running on GHDL version 2.0.0-dev (v1.0.0-974-g0e46300c) [Dunoon edition]
0.00ns INFO Running tests with cocotb v1.7.0.dev0 from /usr/local/lib/python3.9/...
0.00ns INFO Seeding Python random module with 1644512771
0.00ns INFO Found test tb_uarttx.test_uarttx
0.00ns INFO running test_uarttx (1/1)
First simple test
0.00ns INFO Valid-accept driver
0.00ns INFO cocotbext-vai version 0.0.1
0.00ns INFO Copyright (c) 2022 Torsten Meissner
0.00ns INFO UART receiver
0.00ns INFO cocotbext-uart version 0.0.1
0.00ns INFO Copyright (c) 2022 Torsten Meissner
100.00ns INFO Released reset
110.00ns INFO Send data: 0xb6
...
11160.00ns INFO Received data: 0xd8
11160.00ns INFO test_uarttx passed
11160.00ns INFO **********************************************************************
** TEST STATUS SIM TIME (ns) REAL TIME (s)
**********************************************************************
** tb_uarttx.test_uarttx PASS 11160.00 0.21
**********************************************************************
** TESTS=1 PASS=1 FAIL=0 SKIP=0 11160.00 0.22
**********************************************************************
Python Packages
Cocotb related
- Reusable packages for cocotb testbenches
- Bus protocols, reference models etc.
- Verification libraries
- pyuvm
- cocotb-coverage
- uvm-python
- Depending on cocotb
Python generic
- Generic Python packages useful for verification
- pyvsc
- pyucis
- Whole Python ecosystem
- Not depending on cocotb
Python Packages: pyvsc
Python library for Verification Stimulus and Coverage
- Random verification-stimulus generation
- Functional coverage collection
- Implemented in pure Python
- Uses Boolector SMT-solver for solving user-defined constraints
@vsc.randobj
class my_cr():
def __init__(self):
self.a = vsc.rand_bit_t(8)
self.b = vsc.rand_bit_t(8)
@vsc.constraint
def ab_c(self):
self.a != 0
self.a <= self.b
self.b in vsc.rangelist(1,2,4,8)
Live Demo
UART transmitter & receiver
- Simple tests using self written Python models for VAI & UART
Wishbone slave with local SRAM interface
- Using cocotbext-wishbone package from PyPI
AES128 en- and decryption
- Using pyvsc for constrained random & functional coverage
- Using Pycrypto for AES reference
Summary
- Easy to use
- Good documentation
- In active development with regular releases
- Free and open-source
- Allows Python SW-developers to verify digital systems
- Supports all major simulators used by FPGA teams
Presentation's code examples
References
- https://github.com/cocotb/cocotb
- https://github.com/fvutils/pyvsc
- https://github.com/wallento/cocotbext-wishbone
Extras: Accessing signals
dut.signal.value = 1
- Value is stored by the Scheduler
- All stored values are written at the same time at the end of the current simulator time step
.setimmediatevalue()
- Value is assigned to this simulation object immediately
Access to elements of indexable objects (arrays etc.)
dut.some_array[0].value = 1
- Bit order depends on the HDL object (to or downto)
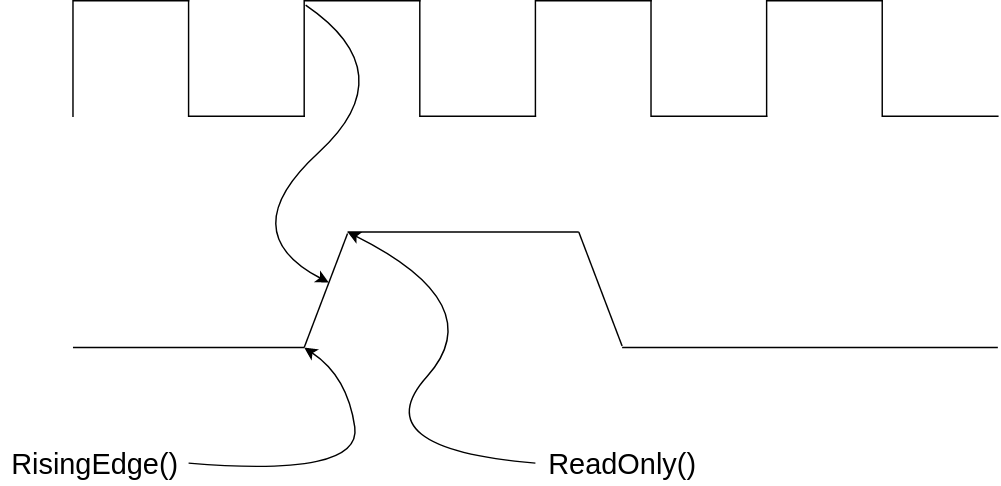
Extras: Accessing signals
Reading synchronous signals
- Returns after clock changes, but no sympathetic signals changed yet
- Sampling any signal here returns values settled during previous clock cycle
- Equivalent to registered processes in HDLs
ReadOnly()
- Triggers in the postpone phase
- All signals have settled
- No more updates may occur on the clock edge event
- Sampling any signal here returns values settled in current clock cycle
Extras: Accessing signals